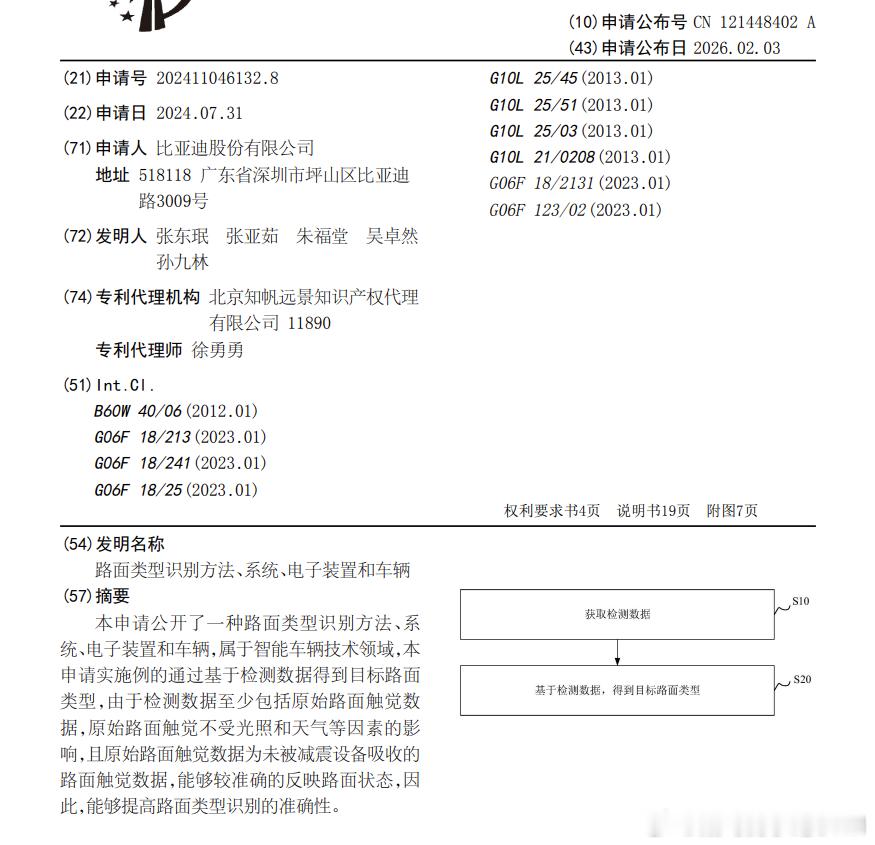
技术巡猎 比亚迪 路面类型识别方法、系统、电子装置和车辆---很多人聊“路面识别”的时候,第一反应都是摄像头,看颜色、看纹理、看积水反光。但是用车里最烦的场景---夜里下雨、逆光、路面补丁一块深一块浅、前车溅起一层雾,你会发现“看路”这条链路其实非常虚,画面糊了之后,模型就开始猜了,感知开始猜,底盘/驱动策略也跟着猜,舒适性和安全边界是啥情况你都猜得到。
比亚迪这份专利的思路是不仅仅让“眼睛”兜底,也考虑让车用“手”去摸摸路上的石头。核心检测数据,放在了“未被减震设备吸收的路面触觉数据”上---悬架减振器天生会把路面的高频、尖锐激励过滤掉,过滤完你再去判断路面,已经像隔着手套摸东西了;那就把传感器放到更靠近轮端、刚性连接更强的位置,把那口“原汁原味”的触觉拿回来。
触觉数据,本质就是振动加速度,而且是三轴:横向、纵向、垂向。识别方法上,主要是用时域特征(均值、方差、最大最小、峰峰值这类),再做傅里叶得到频域特征(平均频率、能量谱、中心频率这些),也做连续小波变换拿时频域特征。你可以把它理解成---同一段路,在不同路面上给轮端的“震动指纹”不一样,模型要学会认这个指纹。
但比亚迪也没走极端,这里不仅是“触觉就够了”。它也加了声学:胎噪音频可以通过声学传感器采集,安装点是车轮后挡泥板。音频这条线的处理就是典型语音/声学套路:预加重、分帧、加窗、短时傅里叶,再过 Mel 滤波器变成 Mel 频谱图,然后用深度残差网络去提特征。触觉+声学融合成一个“第一识别结果”,等于又多了一条证据链:路面不只“震起来不一样”,也“响起来不一样”。
视觉这条线也保留了,但它在体系里更像是“第三方证人”,而不是“法官”。视频数据会分帧,每一帧用 ResNet-18 去做候选路面识别,再用投票把出现频率最高的候选当成“第二识别结果”。最后做仲裁:第一识别路面和第二识别路面一致,就直接确认;如果不一致,就比置信度,置信度高的赢---它承认多模态会冲突,所以把冲突的处理写成规则。
多传感器数据要时间同步,就用时间戳对齐;系统形态上是云端+车端,云服务器算力做主识别,车端在云故障或车辆脱网时接管执行。那识别出来干嘛?
专利给的落点是根据路面类型去选驾驶模式,建立“路面类型---驾驶模式”的对应关系。如果你要让CDC、扭矩分配、牵引控制、能量回收强度这些策略,不总是在“反应之后”才动作,就要考虑这个。如果路面识别更稳,它们就能更早进入合适的状态,车的感觉会更一致,驾驶员也更省心。很多时候,用户说不出哪里高级,但事实就是觉得高级了。
从“视觉世界”拉回到“轮端物理世界”,是个不错的想法。