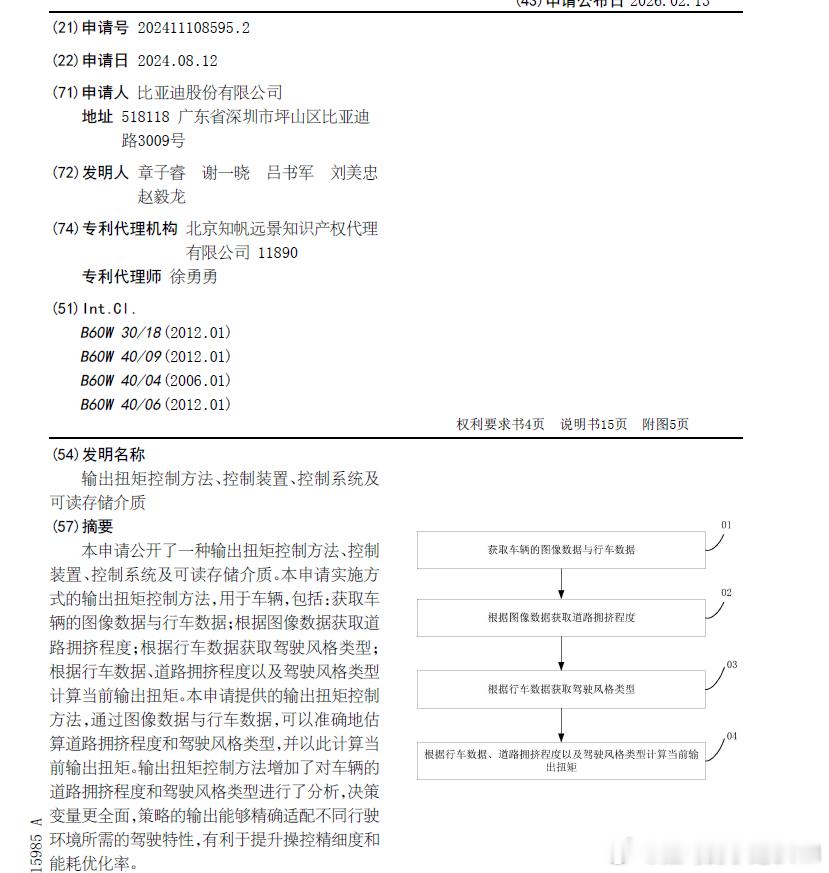
技术巡猎 比亚迪 输出扭矩控制方法、控制装置、控制系统及可读存储介质,“同一台车,换一套脾气”的扭矩管理是有点意思的,这个专利面向的痛点,大家都很熟了:同样是一脚油门,堵城区里的话,你想要的是丝滑不点头;上了快速路你想要的是跟脚、以及干脆。传统标定的时候,主要是靠几张MAP互相切换,工况边界容易有抖动,主观感受就会有差异。
这份专利,主要是把“边界”的切换,从“硬生生”的感受变成概率问题。
它首先用摄像头量化路况。图像数据采样频率设成≥50Hz,专利里做了解释:跟工频照明一致能降低频闪对识别的影响(土办法?但非常有效),正前侧、正后侧、左侧、右侧的图像都用,识别啥呢?前后车的数量、左右侧车辆通过数量,再加上一个“道路类别概率”。道路类别给了沥青混凝土、水泥、石砖三类(也留了“其他”口子)。然后用这些参数,计算道路拥挤程度,把“道路类别概率+拥挤程度”合成一个4×1的第一驾驶工况概率向量:城市拥挤/城市通畅/高速拥挤/高速通畅---这里是四个概率,不是四个标签。
第二条线是“人”。主要是盯着踏板:加速踏板和制动踏板的开度变化频率、开度变化速度。频率定义是这样的,先算开度变化率Δα/Δt,超过阈值η就记一次事件(δ=1),再用单位时间内事件次数当频率;速度则看开度变化率的平均水平。
专利里还给了个“强操作”处理:以0.5s为周期,如果踏板开度变化超过50%,对应的变化速度、变化频率直接按最大值算,它还会同时看长时车速和短时车速(专利举例:长时180s、短时60s),避免只盯瞬时导致误判。
数据链路的话,行车数据可以来自硬线采集和/或CAN报文;硬线采样频率设成≥100Hz,CAN则跟随网络最小周期。并且把数据分成长时/短时/瞬时三层:长时和短时里不仅有车速、扭矩、踏板开度,还有踏板开度变化速率;瞬时里还包含挡位、电机扭矩、电机转速这些更“控制侧”的变量。这个分层设计的意思很直白:既要看趋势(你最近一段时间怎么开),也要看眼前(你这一脚想干嘛)。
更关键的一步在这里:它不是只拿“当前值”做判断,而是把踏板变化频率/速度在长时数据里的分布特征,拿去对照“标准循环工况”的分布特征,再结合识别出来的驾驶风格类型,算出第二个4×1概率向量。你的脚法不是一秒钟定性,而是被当成统计分布来对待---这就更接近真实驾驶,也更利于在能耗和舒适之间做稳定的个性化平衡。
两条概率向量到手后,就回到了规则库。规则库来自历史驾驶工况+历史行车数据,输入可以包括当前速度、当前扭矩、加速/制动踏板开度等,输出三类扭矩修正因子:目标输出扭矩修正因子、扭矩加载修正因子、扭矩卸载修正因子。这里的“加载/卸载”就是你踩下去那一下、松开那一下---决定了车到底是“跟脚”还是“点头”,也决定了回馈能不能做到既省电又不恶心。
最终扭矩怎么出呢?专利做了行驶状态位:驱动、滑行回馈、制动回馈。它会结合驱动扭矩曲线/回馈扭矩曲线,先拿到目标扭矩基本值、加载速率基值、卸载速率基值,再叠加三类修正因子,把上一时刻扭矩带进去做平滑处理,如此,你就能感觉到它追求的并不是某个瞬间的“更大扭矩”,而是整段扭矩爬升/回收过程更为可控、更为一致。