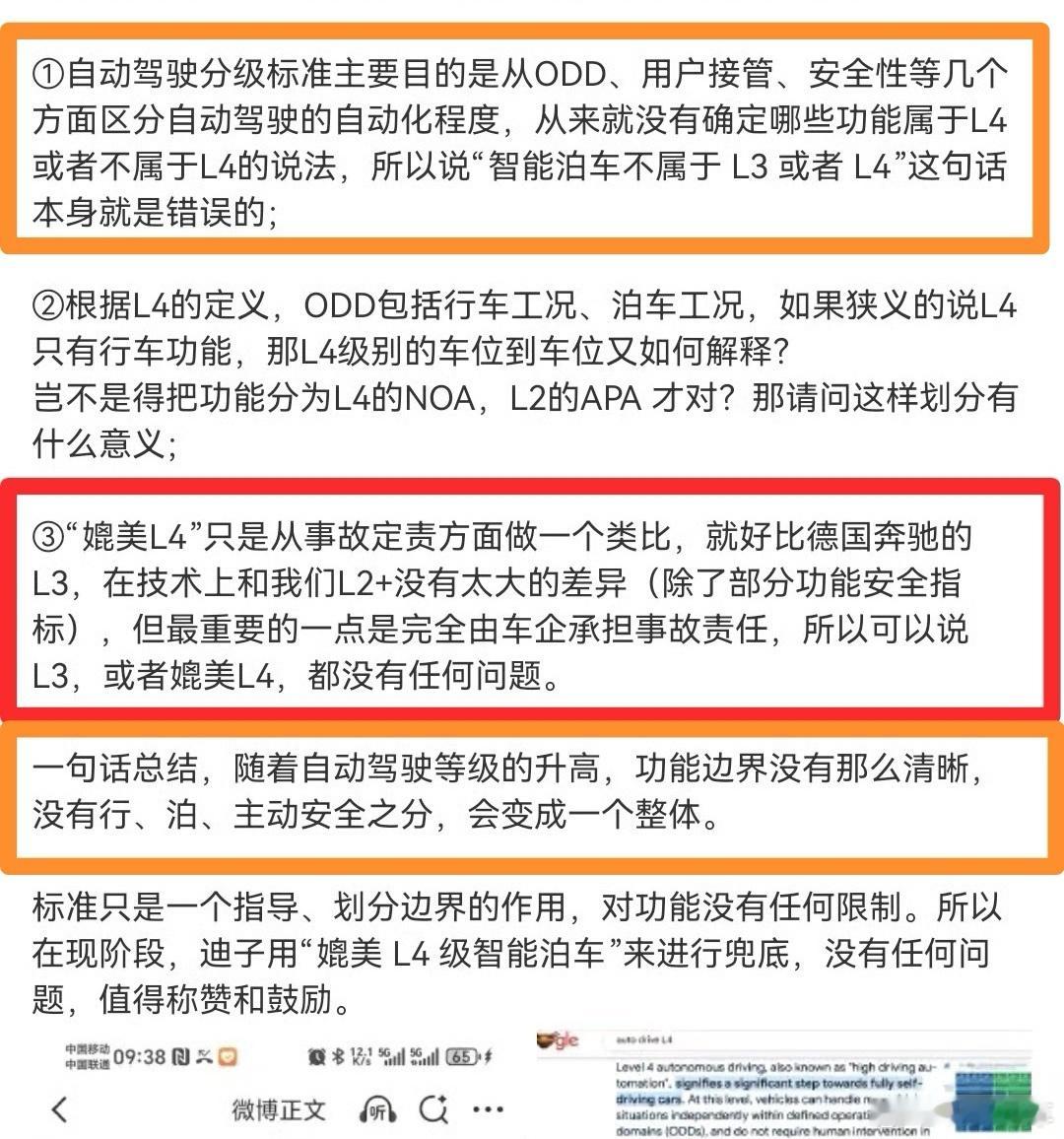
昨天已经说过,图1里红框的内容纯属无稽之谈,今天继续来科普另一个常见误区:功能边界会越来越模糊?泊车场景是不是也像行车一样有L1–L5的分级?
关于“功能边界”,我昨天在 那篇文章中已经详细解释过——恰恰相反,随着自动驾驶等级越高,系统对ODD(设计运行域)的限制反而要更加严格。包括主动安全功能本身也必须有严格的ODD。这都不懂的,只能说是连基本的智驾常识都没有。而L5只是一个愿景,短期内不具备现实意义,并且也不是模糊边界,而是将严格的有限制直接变成无限制ODD。
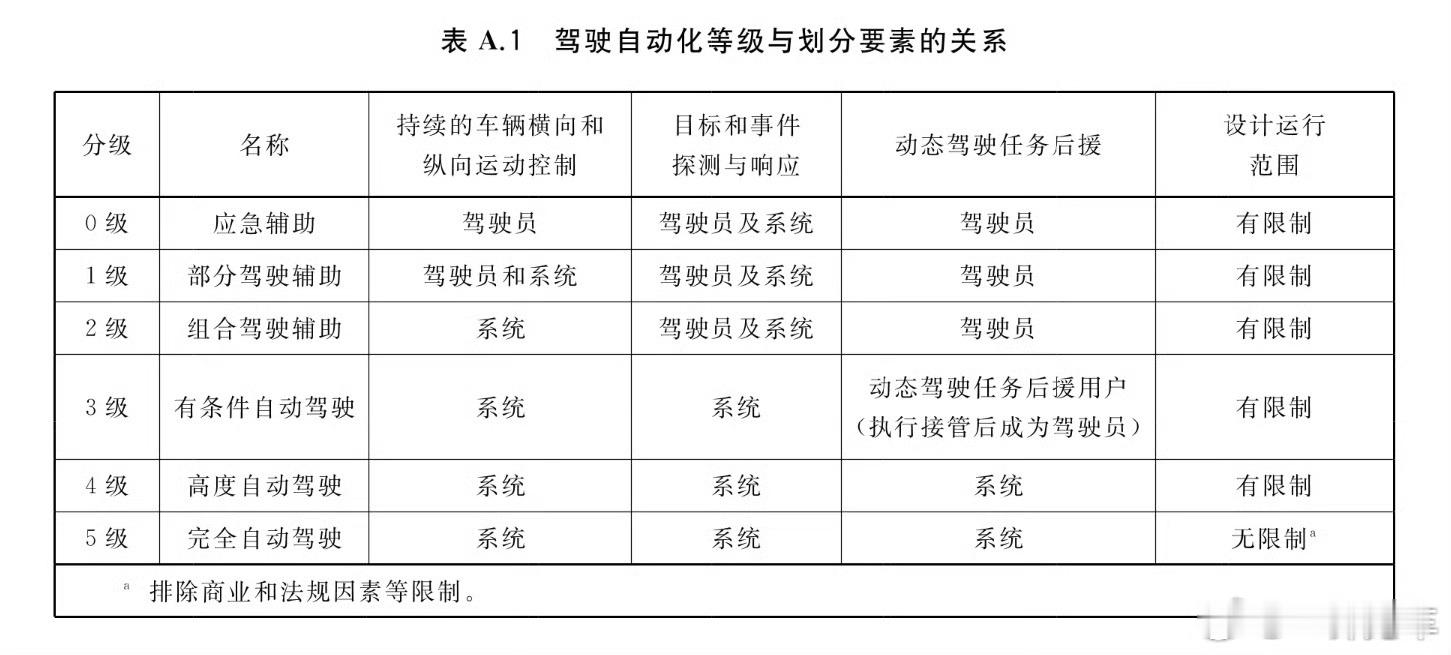
那么泊车类功能有没有 L1–L5 的划分?从现行标准来看,GB/T 40429‑2021和GB/T 44721‑2024均主要针对车辆在道路上执行动态驾驶任务的能力进行分级,目前我们在讨论的要等法规落地才能“脱手脱眼/脱脑”的L3/L4自动驾驶也是针对道路行车场景。即便今年高速 L3 正式落地,也不代表“L4级泊车”就一定会同步落地,这完全是两套体系。
如果泊车类功能按行车一样管理,区分L2/L4等,那么“离车泊入”现在就根本不会被允许,而是会像在外部道路一样要求驾驶员必须在座位上。
● 但是,但是,重要的是从责任角度讲,出了事故谁负责?这个也很好理解,比如你在停车场里玩无人机伤了人,谁负责?当然是使用者你自己呀。
本质上就是,你使用工具造成了意外事故,是你的过失,你当然就要承担相关的民事甚至刑事责任。最近原本的“自动泊车”等泊车类功能都被要求加上了“辅助”二字,我理解就是为了强调责任划分:这只是个辅助功能,不管算不算“交通肇事”,你使用辅助工具出了任何问题,责任当然都是你的。
可以理解为,泊车场景本质上就只有“辅助”和“无监督自动”两个级别。后者系统应当能自己确保安全,无需使用者监督,相关功能的责任可以由使用者转移到厂商。
而这当然也须等行业出台专门的泊车自动化相应标准和规定,理论上可以参考L2/L4标准的区分来制定,区分辅助功能和真正厂商负责的自动化功能,但与行车的L2/L3/L4法规没有必然联系。
总而言之,目前阶段厂商能做的,都只是提供类似于保险的经济保障,绝不可能真的替驾驶员背负事故责任。
厂商提供经济保障都值得鼓励,并且华为ADS从去年就开始做了。而某些KOL、媒体把新加入车企给出的相似经济保障吹成“全面负责”,那只能说是纯属误导消费者,非蠢即坏了。