[RO]《TiPToP: A Modular Open-Vocabulary Planning System for Robotic Manipulation》W Shen, N Kumar, S Chintalapudi, J Wang… [MIT CSAIL] (2026)
在机器人操作领域,构建一个"开箱即用"的通用操控系统是长期悬题。现有方案两极分化:端到端的VLA模型需要数百小时机器人专属训练数据;传统TAMP系统虽具结构性推理能力,却与特定硬件深度耦合,难以移植和复现。
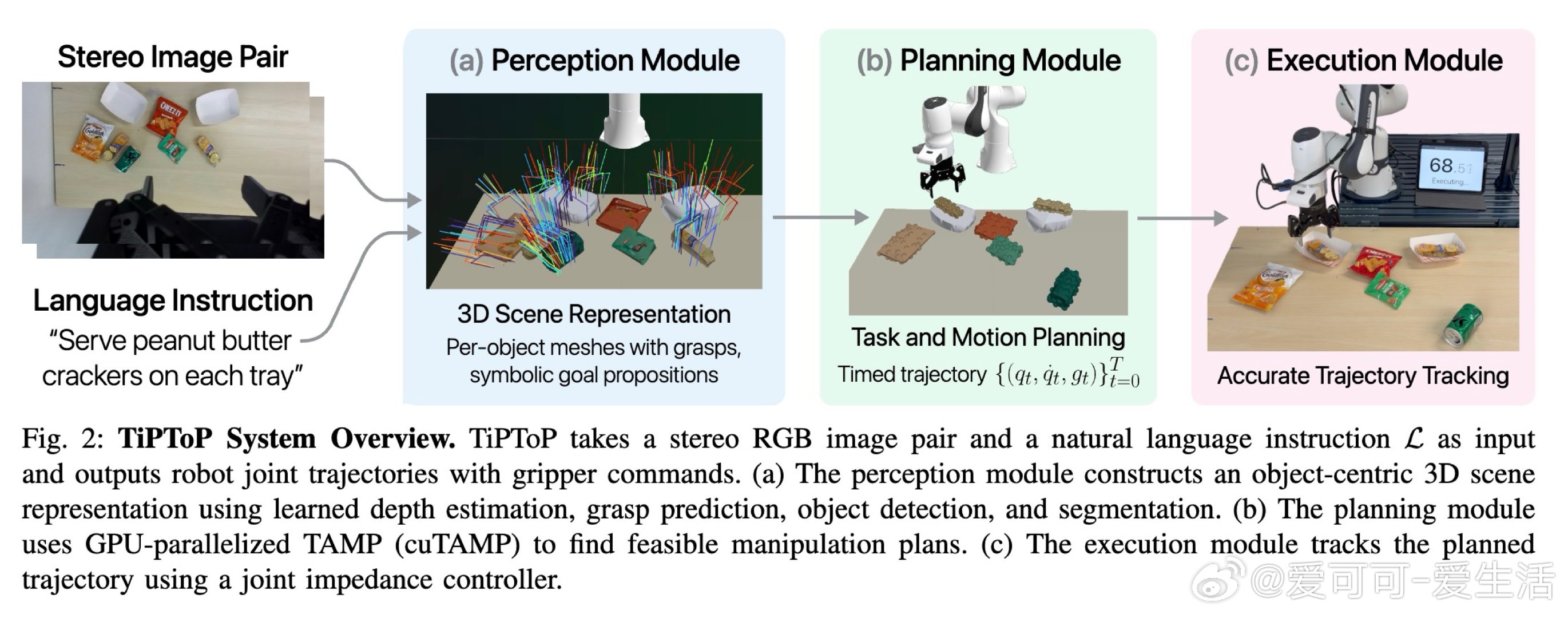
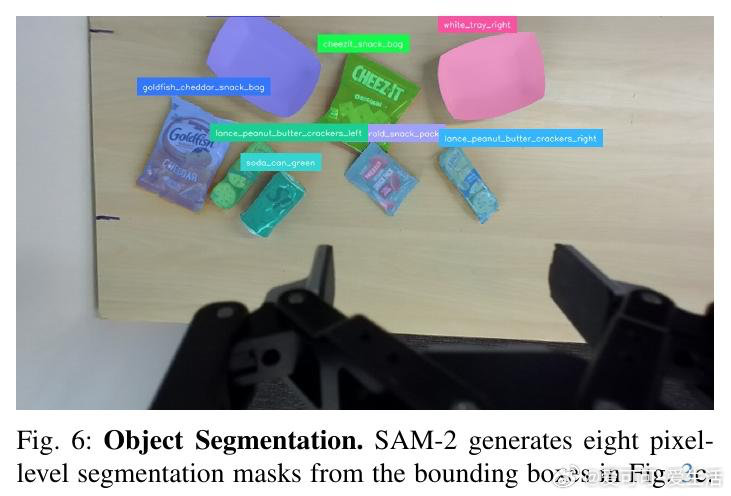
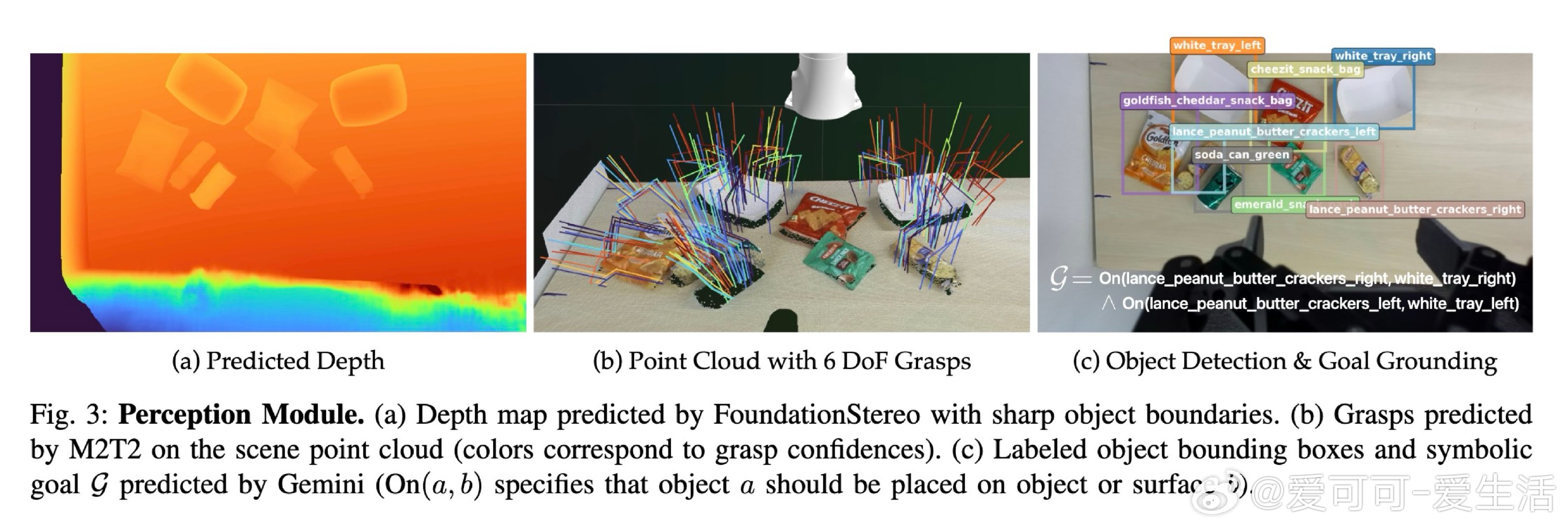
本文的核心洞见是:把"通用操控"重新看作一个可插拔的模块化工程问题。由此,将视觉基础模型(深度估计、抓取预测、VLM目标接地)与GPU并行化TAMP解耦组合这一关键操作,使系统无需任何机器人训练数据即可理解自然语言、推理多步操作序列并生成无碰撞轨迹。
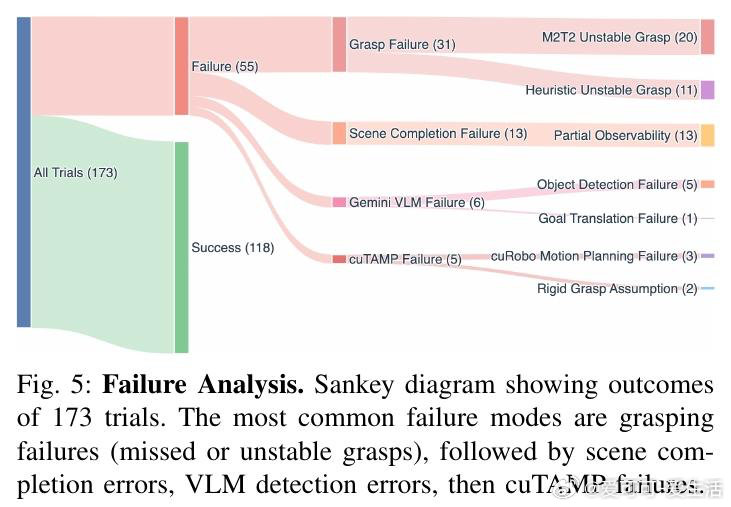
这项工作真正留下的遗产是:证明了拼装现成基础模型加规划算法,足以在语义理解、干扰物排除、多步序列任务上与经过350小时专属数据微调的VLA模型比肩乃至超越。它为后来者打开的新门是:模块化架构天然支持组件级故障溯源与独立升级,为规划与学习的深度融合提供了可操作的实验平台。但尚未跨过的门槛是:开环执行使抓取失败后无法自我纠正,这是当前最主要的失效瓶颈,占所有失败案例的逾半数。
arxiv.org/abs/2603.09971
机器学习 人工智能 论文 AI创造营