宇树开源 UnifoLM-WMA-0 世界模型架构:可理解机器人与环境交互物理规律
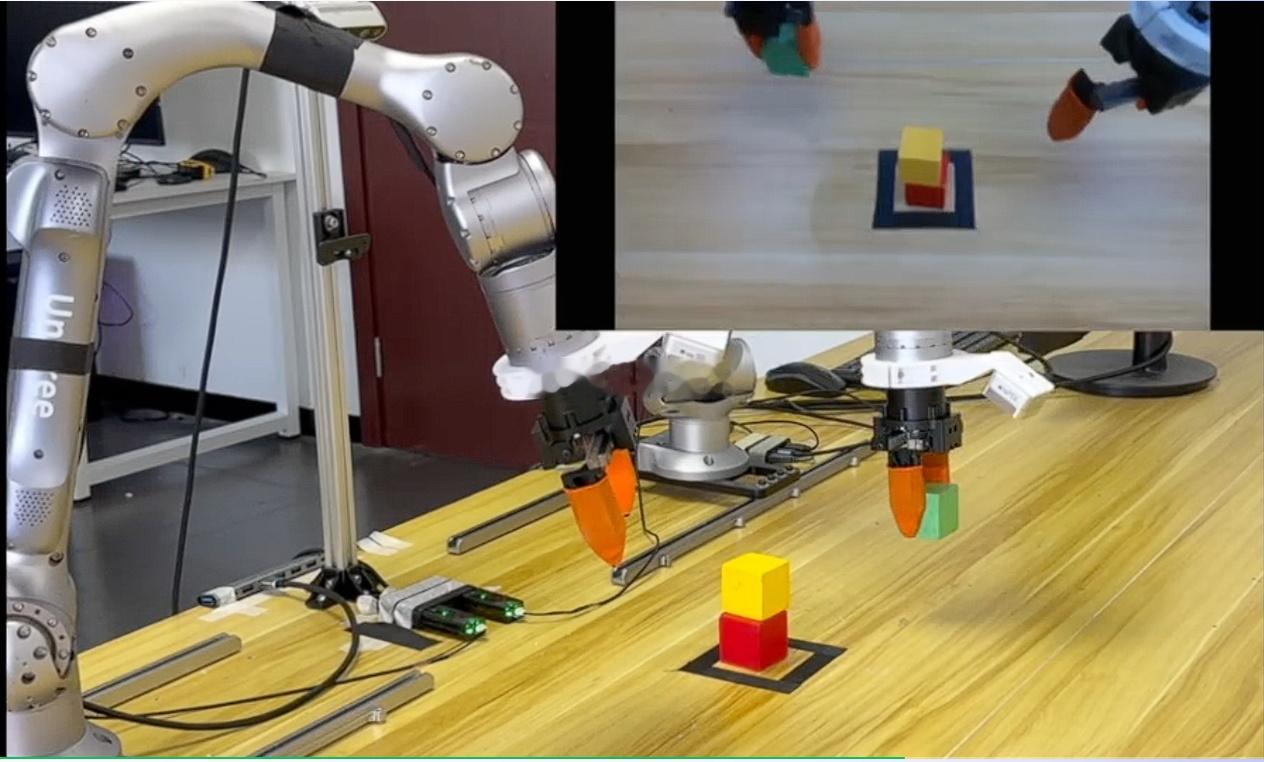
宇树科技今晚宣布开源 UnifoLM-WMA-0,其为宇树科技跨多类机器人本体的开源世界模型-动作架构,专为通用机器人学习而设计,其核心成分在于一个可以理解机器人与环境交互物理规律的世界模型。

宇树开源 UnifoLM-WMA-0 世界模型架构:可理解机器人与环境交互物理规律
宇树科技今晚宣布开源 UnifoLM-WMA-0,其为宇树科技跨多类机器人本体的开源世界模型-动作架构,专为通用机器人学习而设计,其核心成分在于一个可以理解机器人与环境交互物理规律的世界模型。

作者最新文章
热门分类
体育TOP
体育最新文章