🔍研究
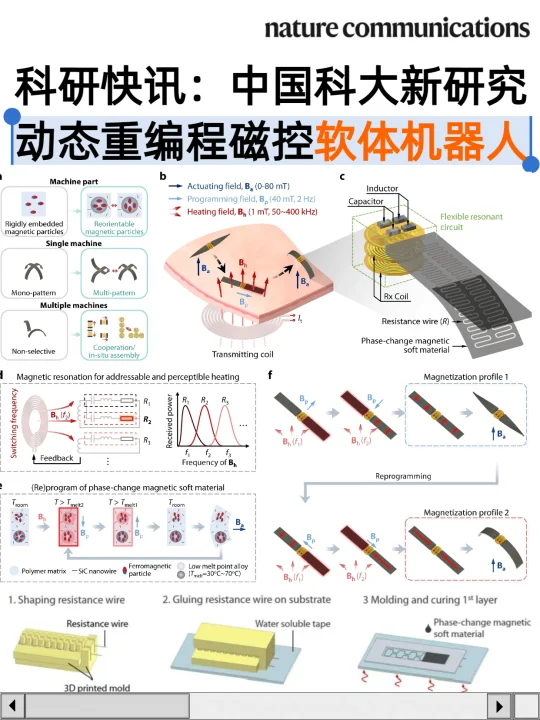
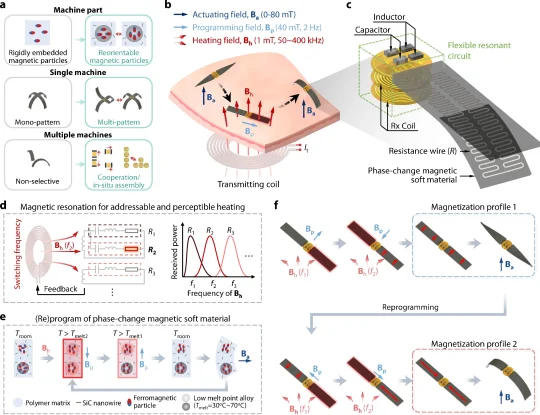
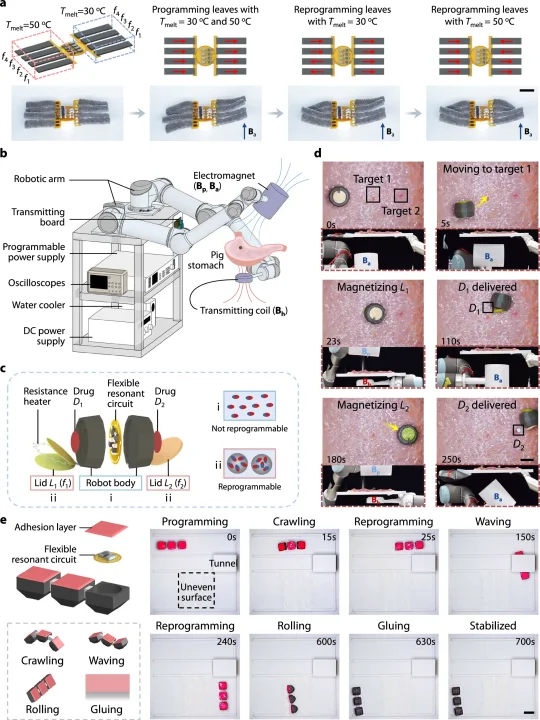
本研究提出了一种新型动态重编程磁控软体机器人。通过可感知磁谐振结合相变软材料设计,实现了单个或多个磁软体机器人的原位重编程,并演示了其在复杂任务、多机协作和原位组装等多方面的应用。
🌟亮点
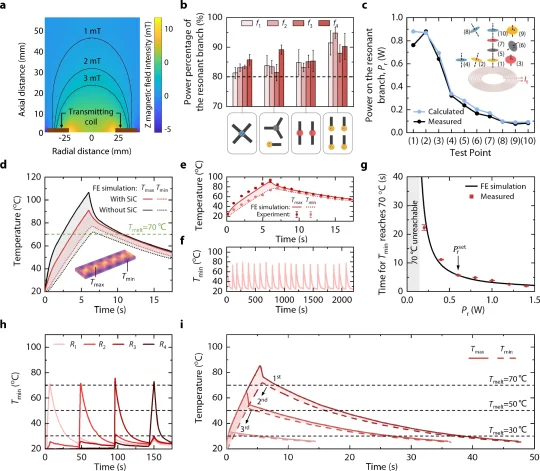
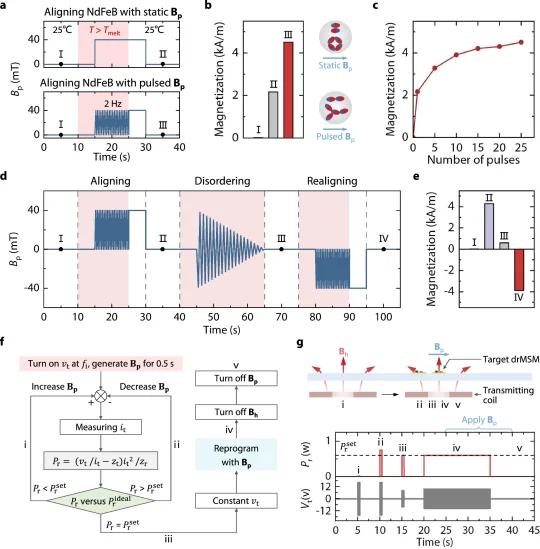
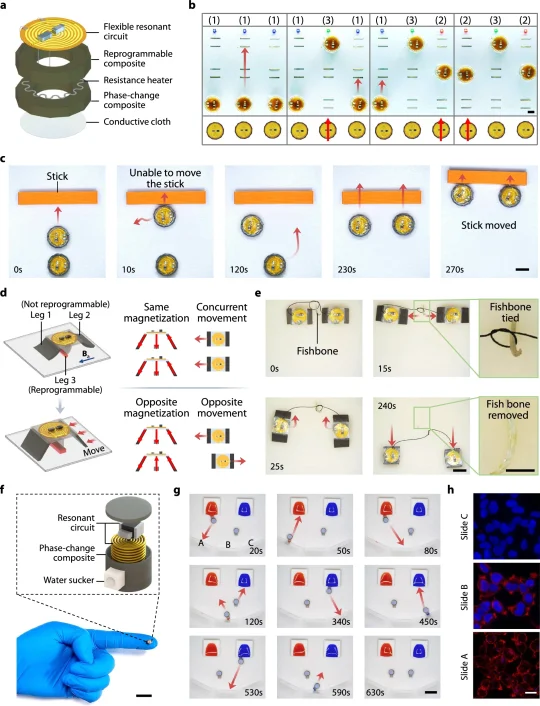
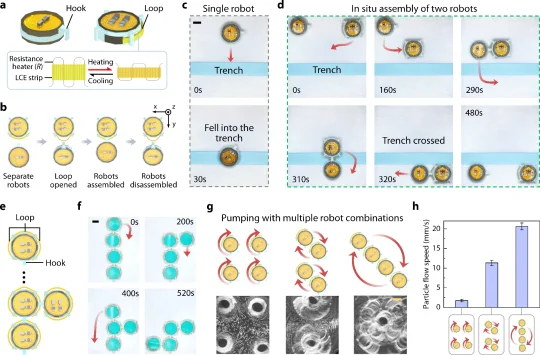
通过柔性谐振电路设计,利用高频磁场选择性加热机器人特定区域,可实时感知能量传输状态。同时,采用低温相变磁性复合材料,并利用脉冲磁场打破磁颗粒间作用力,在40 mT低编程磁场下即可通过固-液相变实现磁化方向快速重构,磁化强度较传统方法提升104%。该控制策略在生物安全温度范围内即可完成磁化重构,避免生物体高温灼伤。其中,相变磁性软材料的柔性谐振电路组装是首先将电阻丝缠绕在3D打印模具上,成型的电阻丝随后被转移至贴有水溶性胶带的载玻片上。
📚来源
DOI: 10.1038/s41467-025-57454-w
标题: Addressable and perceptible dynamic reprogram of ferromagnetic soft machines
微纳3D打印 科研 3D打印 软体机器人文献参考