[LG]《Universal Learning of Nonlinear Dynamics》E Dogariu, A Brahmbhatt, E Hazan [ New York University & Princeton University] (2025)
学习非线性动力系统预测的全新突破,融合控制理论与在线凸优化,提出了高效且具理论保障的算法Observation Spectral Filtering(OSF)。
• 针对边缘稳定的未知非线性系统,OSF无需显式建模隐藏状态,直接基于观测序列构建未来预测映射。
• 引入Luenberger程序,定量刻画系统可学性Q⋆,并通过高维线性观察者系统逼近非线性动力学,连接控制理论观测性与机器学习可学习性。
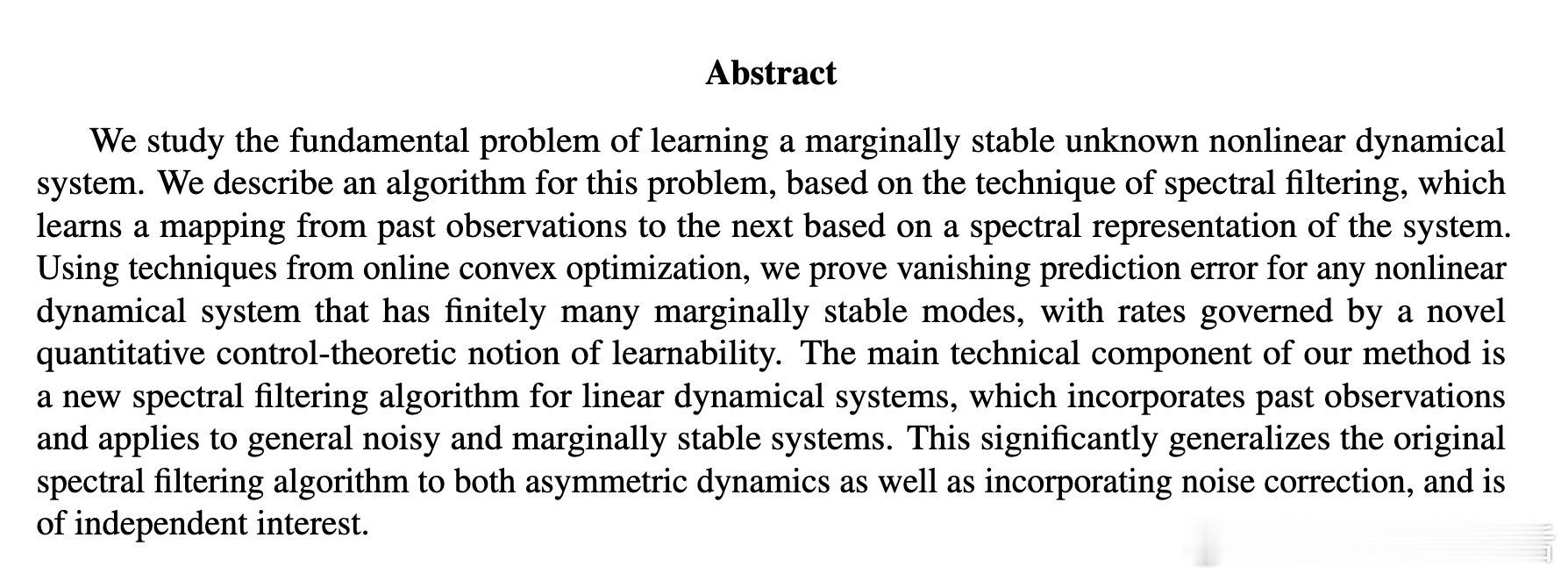
• 设计了适用于非对称、有噪声的线性动力系统的新型谱滤波算法,克服传统方法对称性及噪声限制,性能不依赖隐藏维度。
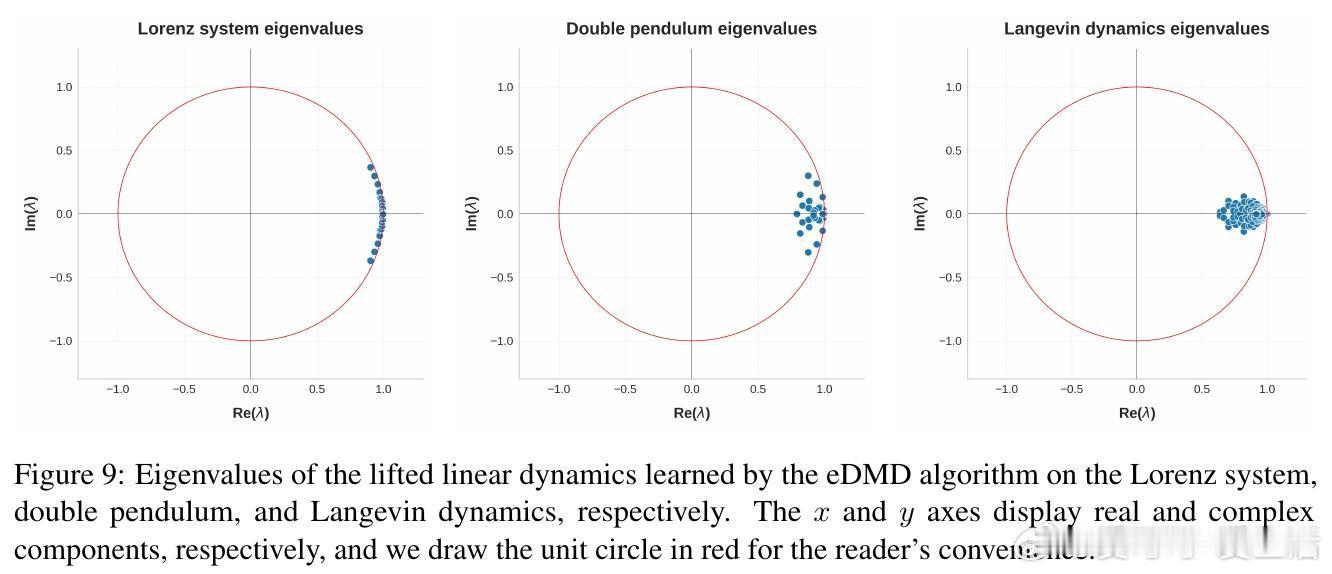
• 提出基于状态空间离散化的全局线性化方法,规避Koopman算子谱截断的复杂假设,实现非线性系统到高维LDS的有效近似。
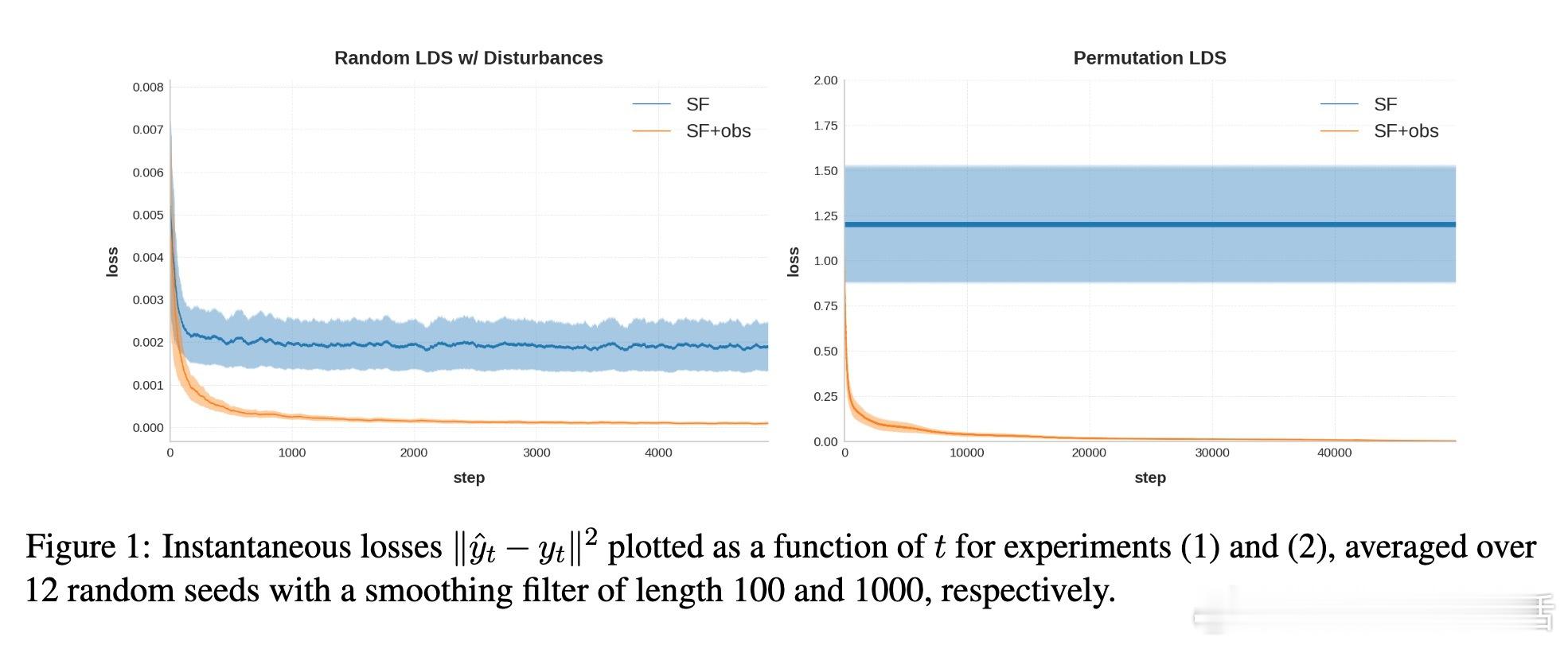
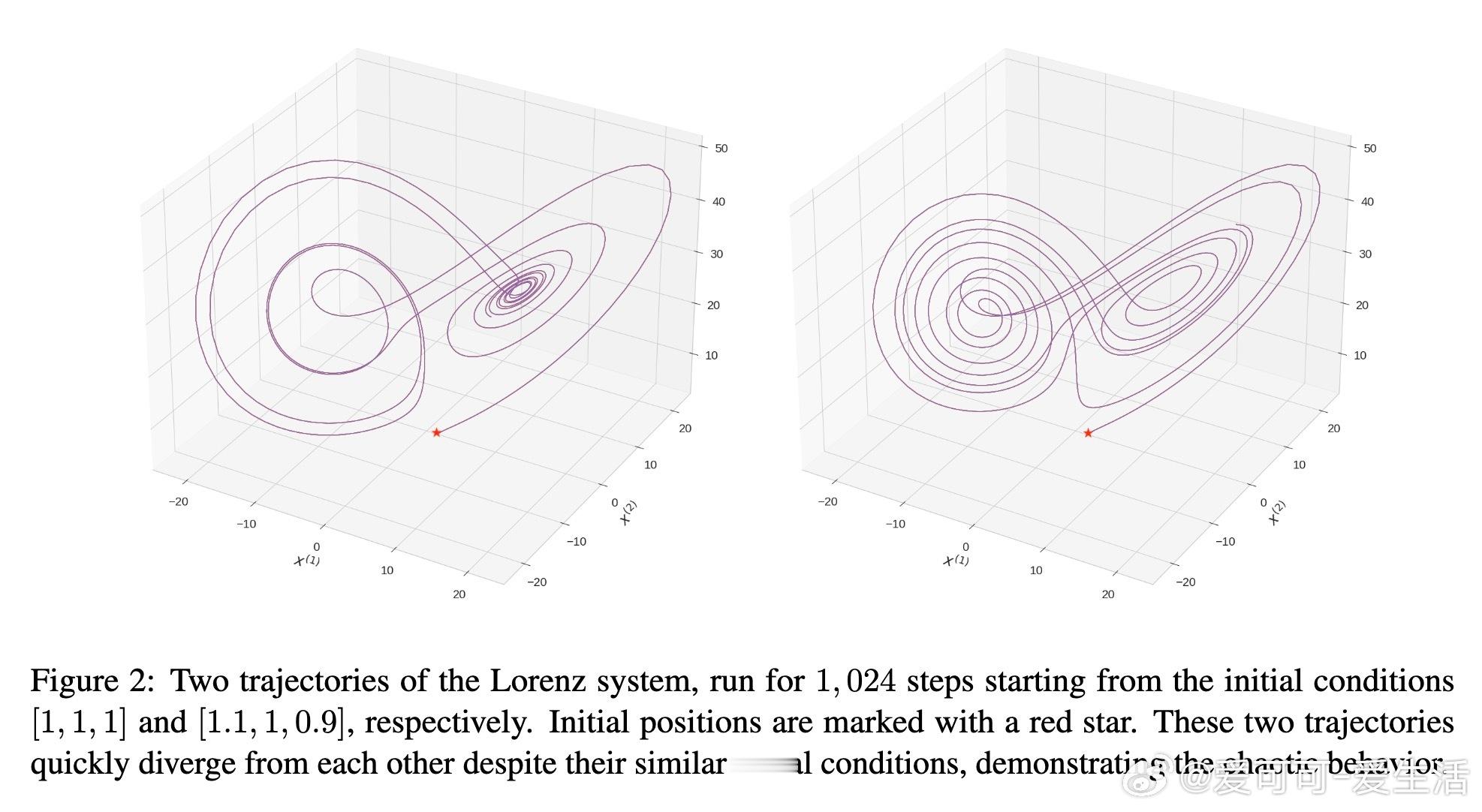
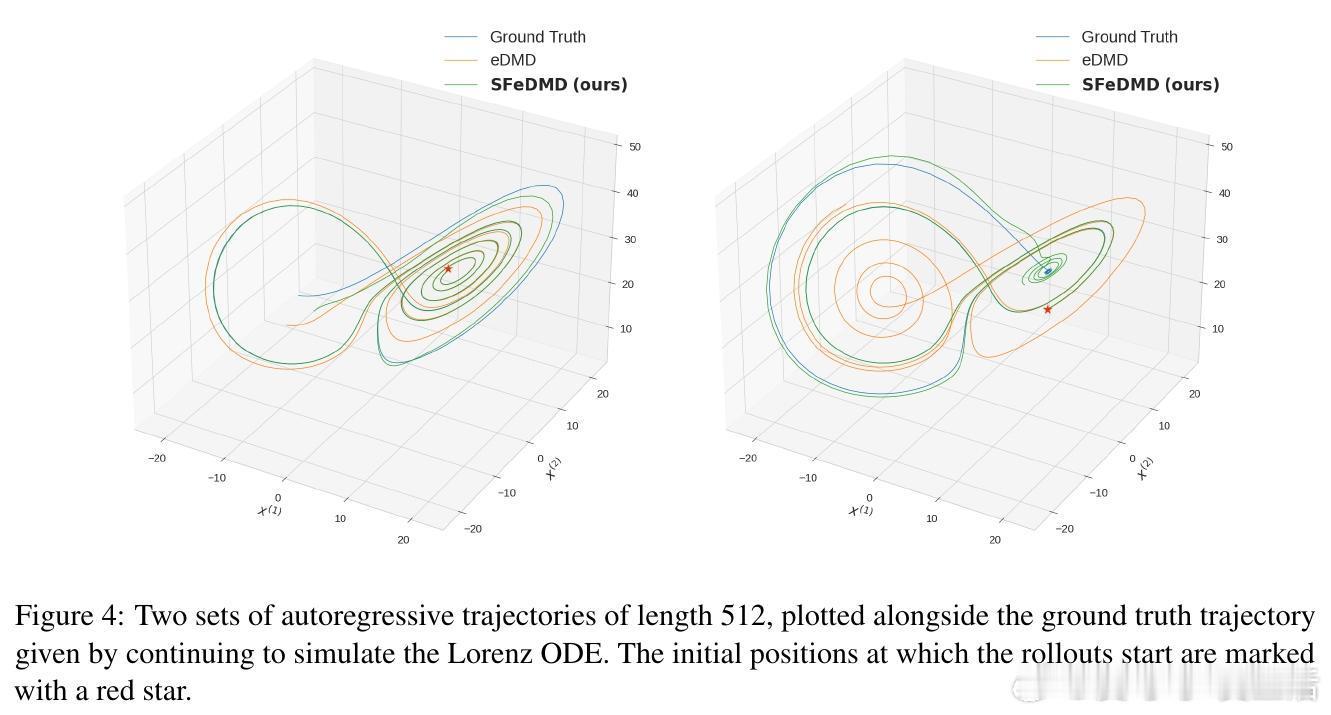
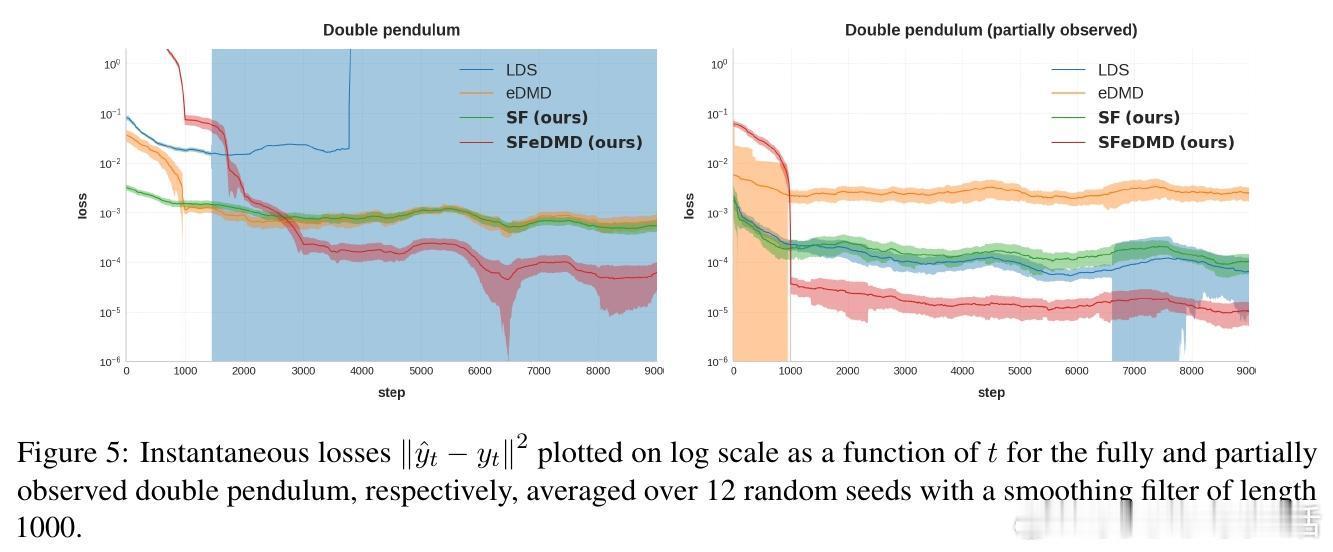
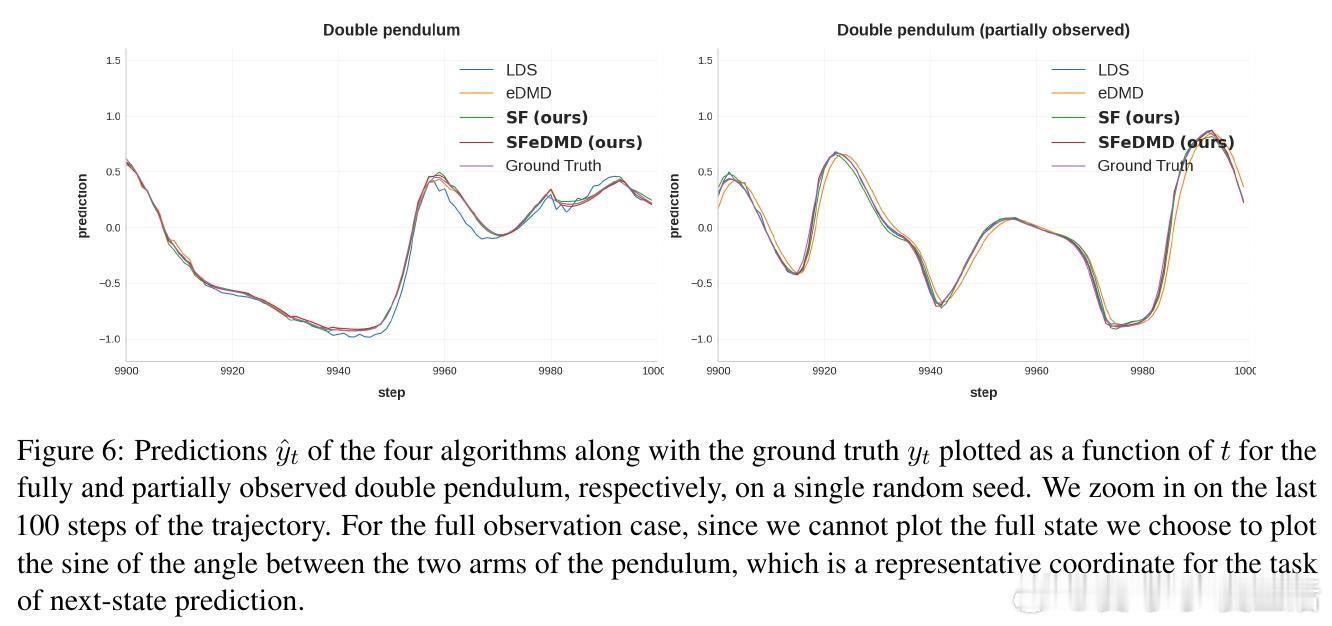
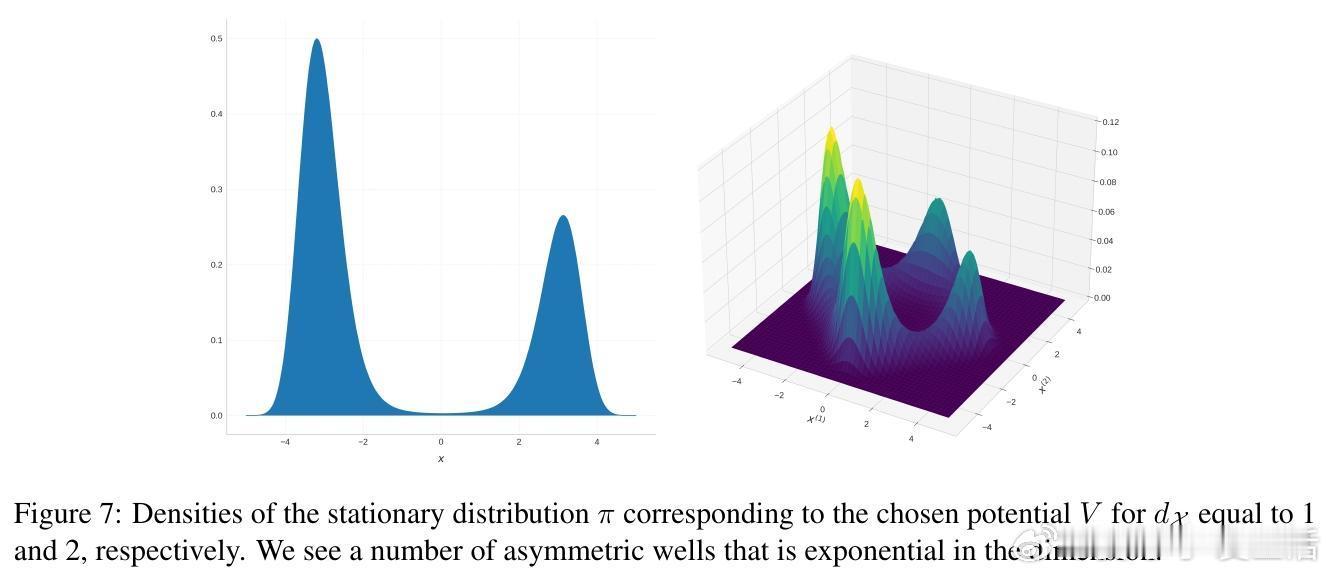
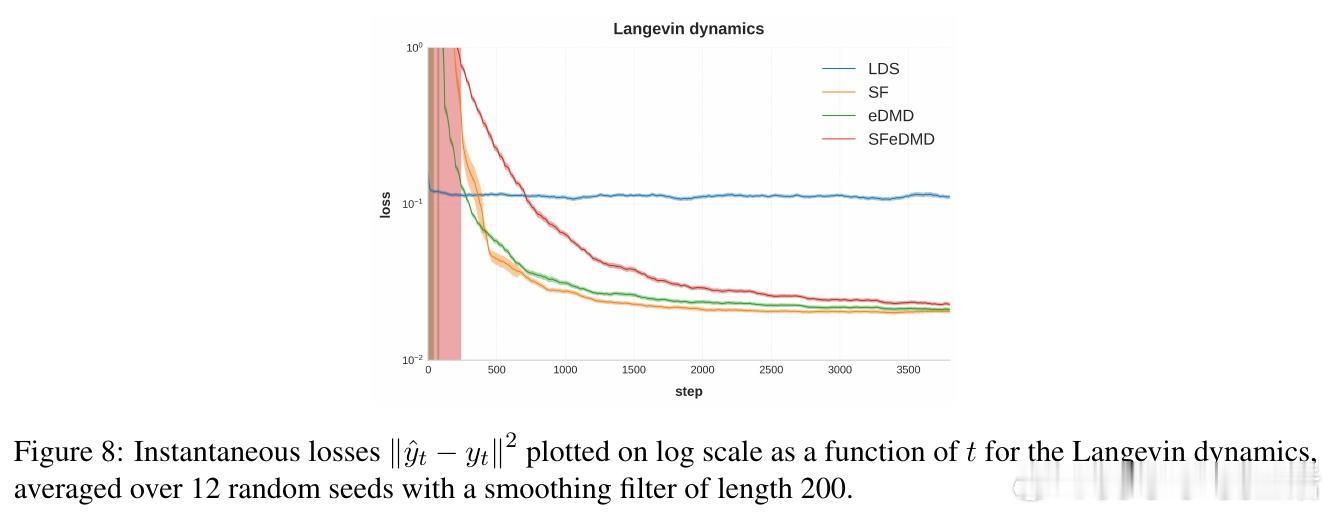
• 理论证明算法在含少量不良谱值的系统上实现子线性遗憾界,适应多种物理和混合动力系统,且数值实验涵盖Lorenz、双摆、Langevin动力学等多种复杂系统,验证了预测准确性与稳定性。
• 该框架为复杂动力学序列预测提供了统一视角,强调“只需学会与最佳高维线性观察者系统竞争”,降低学习难度且提升鲁棒性。
详见🔗arxiv.org/abs/2508.11990
非线性动力系统谱滤波在线凸优化控制理论机器学习系统辨识Koopman算子序列预测