地平线第一次公开量产方案的「端到端」路线|
地平线是行业最早出端到端的技术论文UniAD 并且获得最佳论文的公司,但没想到在量产后,地平线没有选择 one model 的形式。
为啥?
因为地平线做了很久的验证,虽然知道端到端的上限,但是尝试了很长时间验证端到端“短板”,并没有很强的兜底能力。
那地平线的端到端怎么做?
我发现地平线和华为 ADS 3.0 非常类似:
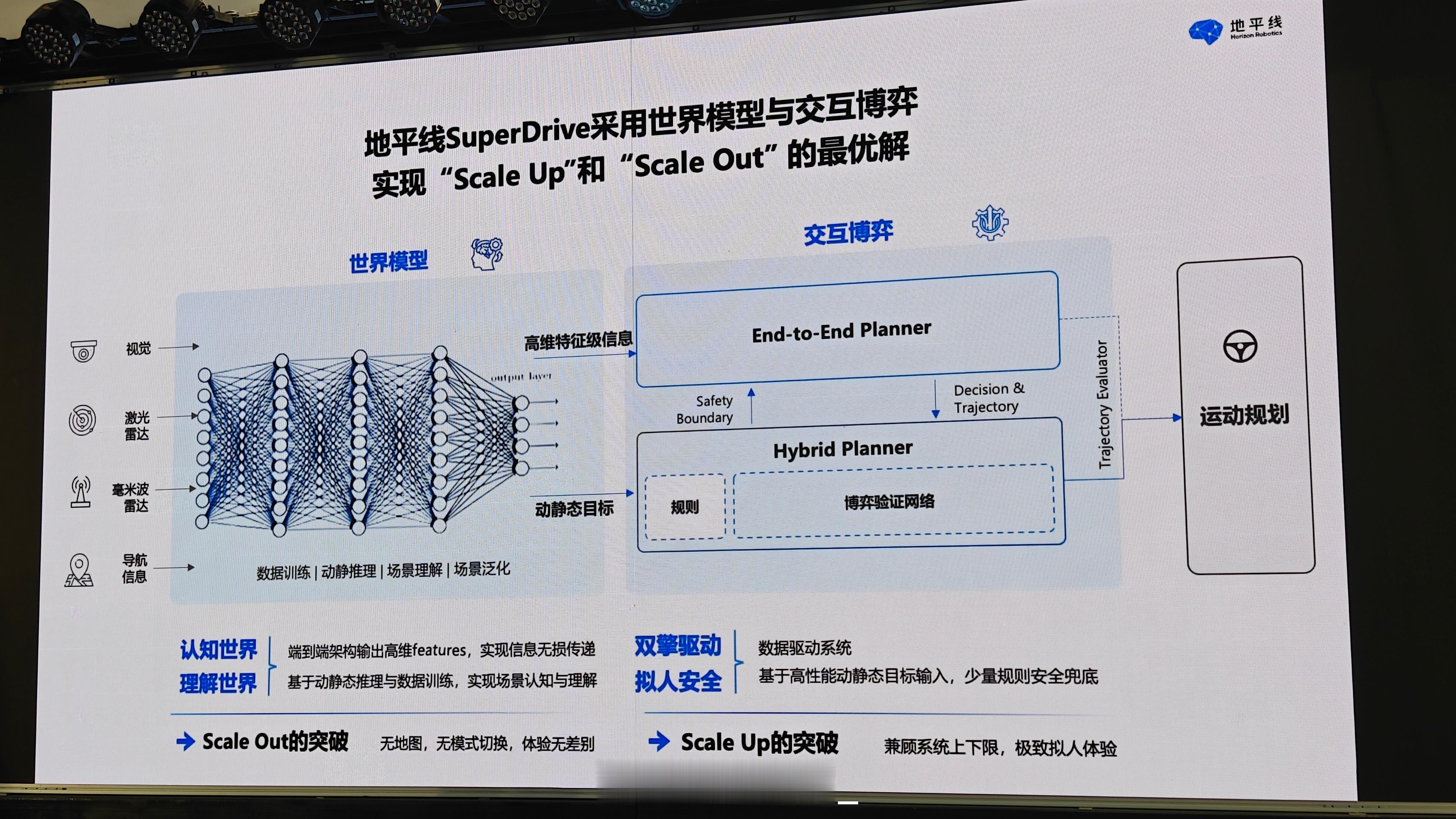
把感知从过去的分模块,比如看静态车道、看动态车辆还有占用网络,过去是一个个模块做的,现在把它组成一个大网络。
所以感知我们可以简单理解是一个端到端大模型,也就是世界模型,但并没有直接输出车辆轨迹。
这也是我惊讶于地平线第二代 SR 的原因,特别是对静态目标比如车道线、路沿或者停着的车辆不抖动,都非常稳定。这也是机器人眼中的世界。
在规划预测控制模块,规划其实也是端到端大模型。也是很多老司机的经验,但这里地平线还是加入了规则模块做兜底,同时也在不断计算端到端的轨迹和规则模块的轨迹哪条会更优?
这样的好处是确保安全的大前提下,也让体验能够“老司机”。
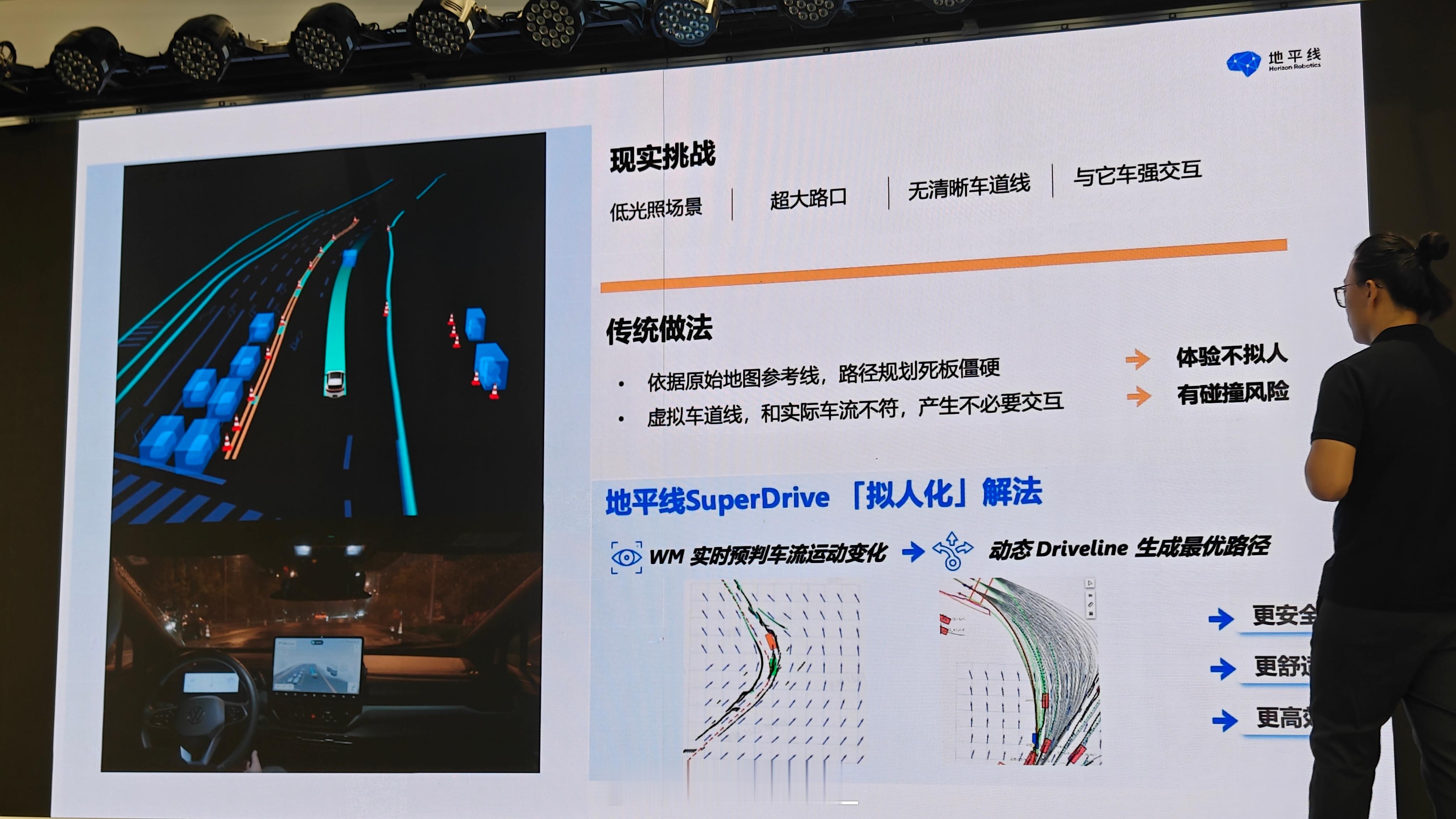
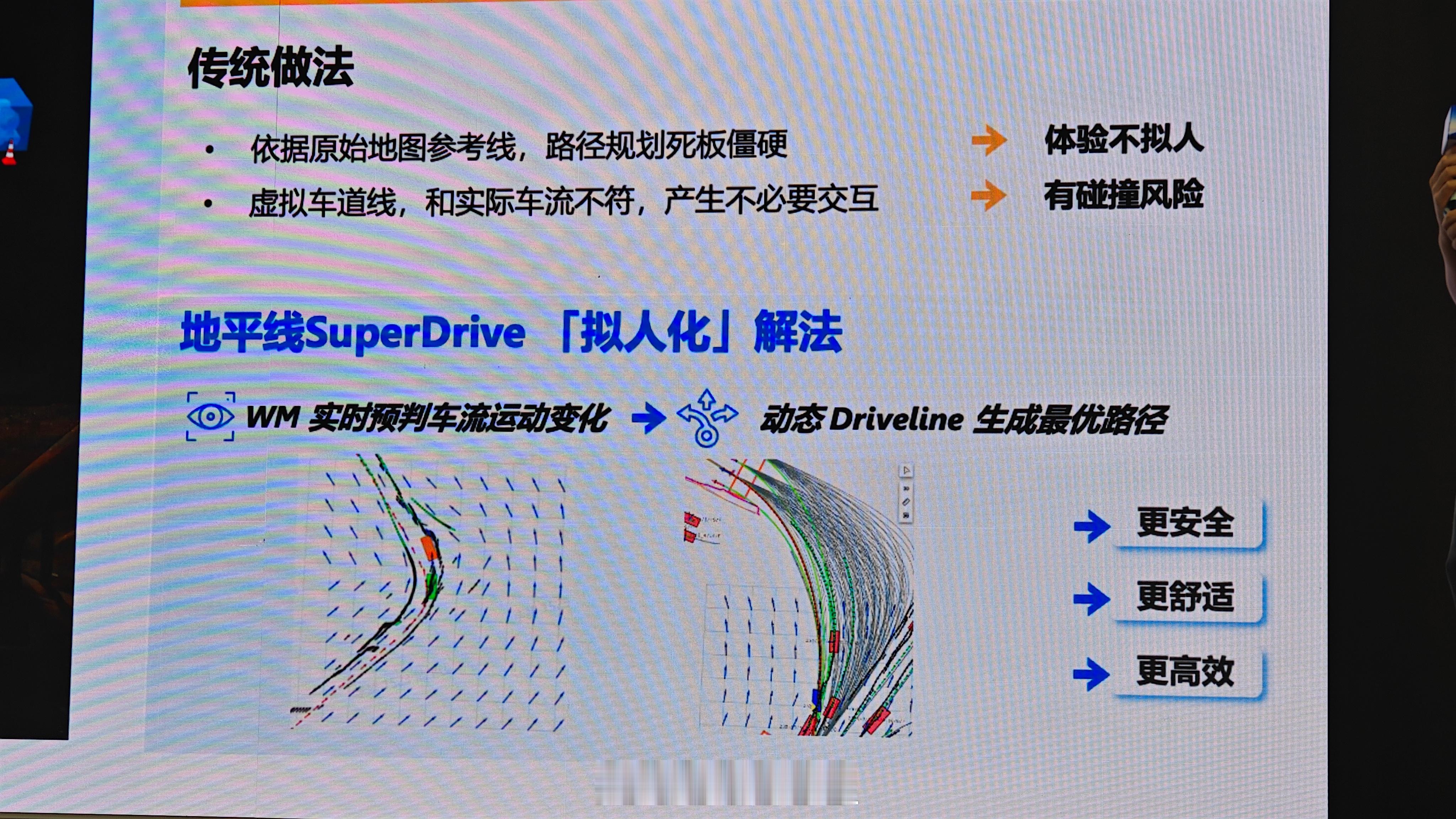
比如过大型路口过去就是铺轨道。如今其实就是预测路口的车辆大家的运动姿态变化,同时靠端到端输出大量轨迹线,最后择优选择几条通过,博弈、绕行策略也是类似。
这样可以提高老司机体感的上限,为确保安全的底线。
#地平线superdrive正式发布##新能源汽车##大v聊车#